Datu estatistikoak aprobetxatuz, urrezko arrazoia bilatzen hasi gara.
Pausu hauek jarraitu ditugu:
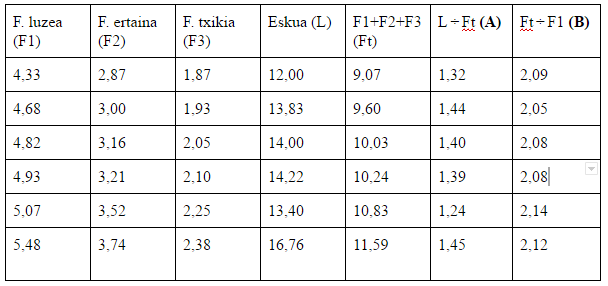
Lehenik falangeen arteko urrezko arrazoietik hurbil dagoen erlazio probableena bilatu genuen, falangeen aukeraketa egin behar da
Aukeratutako falangetan, bataz-bestekoak egin umeen neurketatik
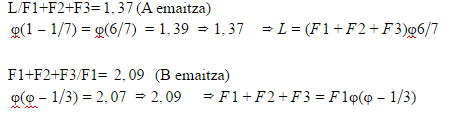
Konbinazio matematikoak bilatu erlazioa lortzeko
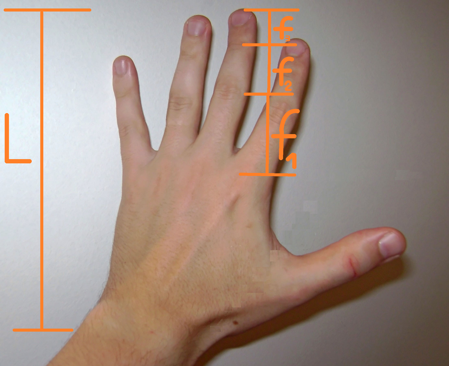
Egin genuen falangeen aukeraketa honakoak izan ziren: Falange guztien batura eta eskuaren luzeeraren arteko eralzioa eta beste alde batetik, falange guztien batura eta falange luzeenaren arteko erlazioa.
Bigarren prototipoa egiteko hasieran «bq robot» izeneko kita pentsatuta geneukan. Zoritxarrez, pentsatu genuen bertan zeuden motorrek ez zutela izango indar nahikorik eta arduinon egitea erabaki genuen.
Beraz, software aldetik Arduino erabiltzen gabiltza.
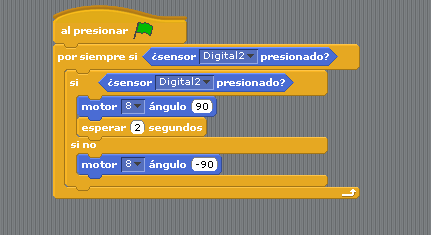
Arduino programatzen hasterakoan, Scratch for Arduino erabiltzea erabaki genuen Arduino purua baino errazagoa delako.
Scratch for arduinozko gure programaketa
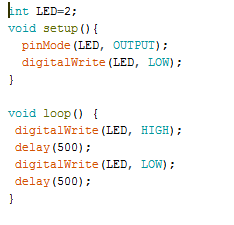
Hala ere, programa hau ez zen izan gure ordenagailuekin bateragarria eta arduino purua garatzen hasi ginen, lehenego LED-ak programatzen ikasiz, gero eta programa garatuagoak egiteko.
Hona hemen LED bat nola piztu eta itzali:
Arduinoz, LED bat segundu erdiro piztu eta itzaltzeaArrduinoz saiakerak egiten
Hemen ikusi daiteke bideo bat non LED-a piztu eta itzaltzen den:
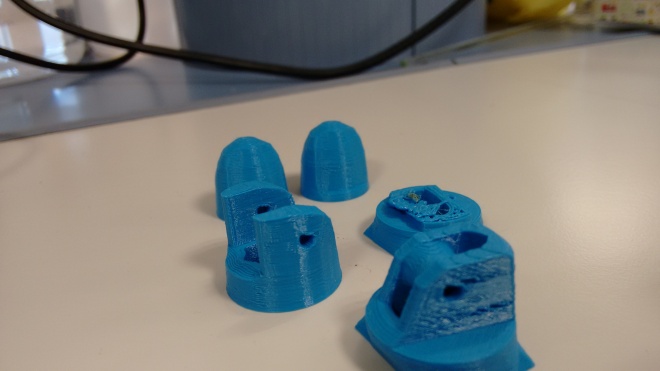
Hardwarearen aldetik, lastotxozko eskua beharrean inprimagailu 3d-aren bitartez esku bat sortuko dugu.
Hala ere, inprimagailuak ez dut lehenengo saiakeratik ondo inprimatzen, beraz gutxinaka parametroak (tenperatura, inprimatzeko xafla eta plastikoaren irteera bidearen arteko distantzia, plastikoaren kalitatea…) aldatzen joan behar dugu pieza ondo atera arte.
Hemen ikusi daiteke inprimagailuak nola inprimatzen duen:
Lehenengo inprimatutako saiakeran, ikusi daiteke plastikoa ez dagoela egoera onean
Piezak ondo inprimatutakoan, atzamarrak muntatzen hasiko gara (inprimatzerakoan piezak desmuntaturik datozelako) ondoren eskuaren ahurrari jartzeko.
Lehenengo atzamarraren muntaia
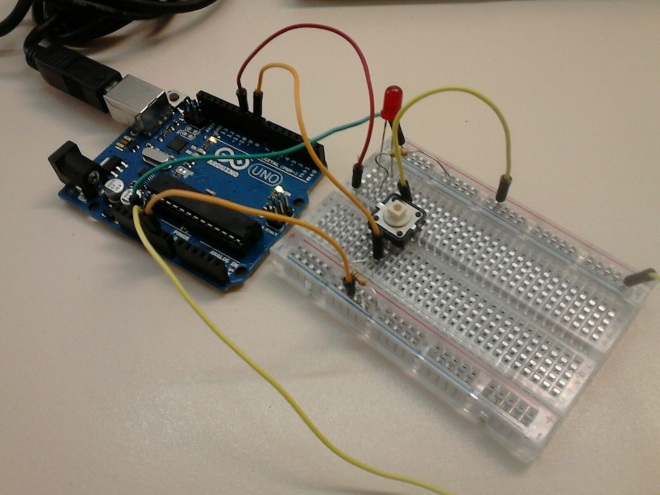
Azkenik, arduinoz presio sentsore bat programatuko dugu eskuak presioa nabaritzean, ireki daiten.
Azkenean, protootipoan presio sentsorea eskauren ahurrean jarri dugu eta servomotoreak atzamr bat mugitzen du.
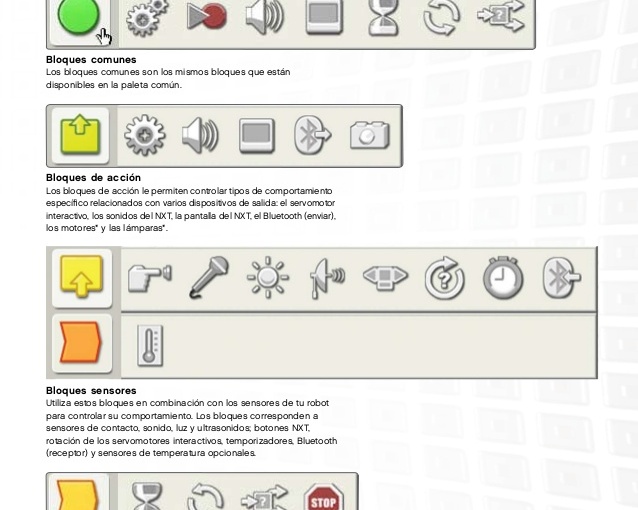
Gure lehenengo prototiporako eskulan eta Lego Mindstorms-en arteko elkarketa bat erabili dugu, NXTak kudeatuta. Teknologia hau lehenengo programazioak egiten ikastera bideratuta dagoenez, hurrengo prototipoak baino errazago programatu dezakegu, eta berarekin bateragarriak diren zenbait sentsore ditugu eskura, hala nola: soinu-sentsorea, ultrasoinu-sentsorea, tenperatura-sentsorea, argi-sentsorea eta kolore-sentsorea.
Giza eskuek presiorako eta tenperaturarako sentsore naturalak dituzte, eta ikusmenarekin batera hauek dira gauzak hartzeko erabilgarrienak. Hala ere, tenperatura gehienbat arriskuak ekiditzeko da, oso bero edo oso hotz dagoen zerbaitek eskua ez erre ez izozteko. Honek berebiziko garrantzia ez duenez gauzak hartzeko ahalmenarekin alboratuta, lehenengo aukeratu dugun sentsore artifizial mota ukimen-sentsorea izan da. Lego sentsoreak potoloegiak izango lirateke esku batetan jartzeko, beraz eskuaren maketaren albo batean jartzea erabaki dugu, honek eskuaren mugimendua aktibatuko badu ere. Hori hurrengo prototipoetan saiestu ahal izango dugun zerbait da, esku sendoago batetan sentsore are txikiagoak jarri ahal izango baititugu.
Bigarren ideia soinu sentsorearen bidez eskuari ireki edo ixteko agindua ematea izan da. Programatzeko zailago izan da, geletan dagoeneko zarata handi eta aldakorra egoten baita, baina Lego sentsoreak erabiltzen ditugun bitartean ezin izango dugu arazo hau ekiditu, ez baitauka aurretiaz programatutako hitz konkretuei erreakzionatzeko aukerarik, dezibelioak bakarrik antzematen dituelako.
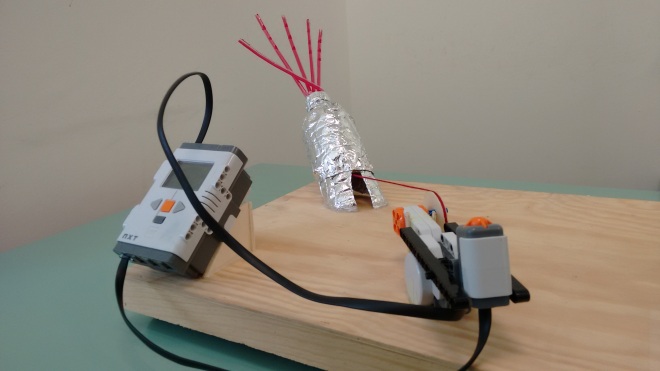
Egin dugun lehen prototipo hau hezurduraren, tendoien eta muskuluen funtzioa argiago ikusteko erabili dugu, atal horietako bakoitza elementu artifizial batzuekin ordezkatuz. Hezurduraren lekua lastotxoz eginiko egitura batek hartu du, atzamarrek dituzten giltzaduretan tolesteko gaitasuna duenak. Giltzadura bakoitzaren erresistentzia aldatuta, eskuan atzamarrak ixten diren ordenean prototipoa ixtea lortu dugu. Tendoien funtzioa hariei eman diegu, txotxongilo baten modura eskuaren mugimendua kontrola ditzaketena. Azkenik, muskuluen funtzioa Lego servomotore batek hartu du. Hatz bakoitzak mugimendu librea izatea beharrezkoa bada ere esku baten funtzionamendu osorako, gure lehenengo frogan bostak motore berara lotu ditugu. Hasiera batean atzamar lodia bere kabuz mugitzeko ideia izan bagenuen ere, lastotxoek ez zuten atzamar hori biratzea ahalbidetzen, beraz, ideia bertan behera utzi behar izan genuen. Prototipoaren muntaian erabili dugun materiala hau izan da:
Egurrezko xafla, sistema osoa bertan bateratzeko.
Lastotxoak eta zelo-zinta eskua egiteko.
Plastikozko ur-botila, moztu ondoren besaurrearen itxura hartu eta eskua eusteko.
Egurrez eginiko polea, honen bidez kablea kiribiltzeko.
Aste honetan zehar gure proiektuko fase berri batean sartu gara. Lehen hezkuntzako zuzendariarekin hitz egin dugu berriz eta berriro lehen hezkuntzako klse berdinetara joan gara. Kasu honetan helburu desberdin batzuk geneuzkan: aurrekoan altuerak, pisuak eta eskuaren luzeerak neurtu genituen bitartean, oraingoan erdiko atzamarraren hiru falangeei neurketak egingo dizkuegu.
Halaber, joan ginen lehenengo aldian neurketak egin genituen baina emaitzak aztertzerakoan batzuk asko aldentzen ziren besteekiko. Horregatik, aprobetxatu dugu eta ume batzuei neurketal berriro egin dizkiegu agian txarto neurtu genuelako
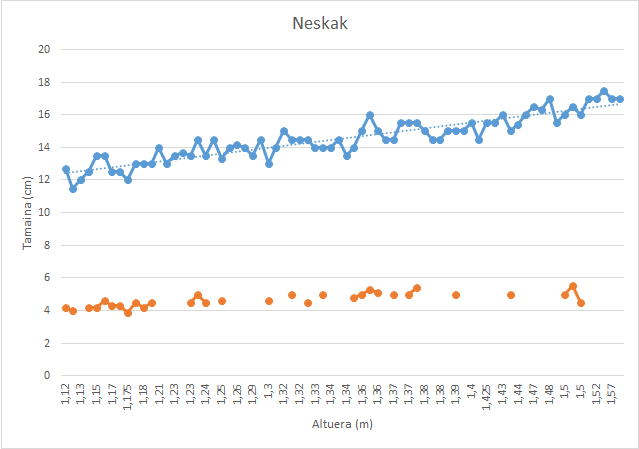
Azkenean, dauzkagun datuen analisi bat egin dugu eta emaitzak aurkeztu ditugu.
Ikusi dugu nola hazkuntza joera bat egon daitekeen. Aztertu behar dugu hazkuntza zuzen baten gainean hazten den edo funtzio polinomiko baten gainean (seguruenik zuzen itxura izango du)
Datuen azterketa sakonago bat egiteko, Lehen Hezkuntzako Koldo Moge matematikako irakaslearekin hitz egitera joango gara eta datuen analisiari buruz azalpenak emango dizkigu.
Bitartean, hemen utziko dizuegu link bat Google Driveko karpeta batera bidaliko zaituena. Bertan, gure datuen bilketaren emaitzak eskuragai dauzkazue excel batzuetan eta deskargatu ahal dituzue nahi baduzue.
Karpetan hau aurkituko duzue:
Mutilen eskuaren luzeera: Irudi bat da non mutil guztien datuak agertzen diren eta eskuaren luzeeraren eta altueraren arteko erlazioa agertzen den (falangeei buruz geneuzkagun datu gutxiak agertzen dira ere baina ez dute ondorioak lortzea ahalbidetzen).
Nesken eskuaren luzeera: Irudi bat da non neska guztien datuak agertzen diren eta eskuaren luzeeraren eta altueraren arteko erlazioa agertzen den (hemen ere, falangeei buruz geneuzkagun datu gutxiak agertzen dira baina ez dute ondorioak lortzea ahalbidetzen).
Altuera, eskuaren luzeera eta pisuaren arteko erlazioa adinetan oinarrituta: Excel dokumentu bat da non datuak Lehen Hezkuntzako klasen arabera antolatuak izan dira (klase bateko neskak eta mutilak banatuak izanik) eta altuera eta eskuaren erlazio bat egiten den, baina, pisua ere agertzen den eta kasu batzuetan (datuak izan edo ezaren arabera, falangearen luzeera agertzen da).
Datuen antolaketa sexuaren arabera: Excel dokumentu bat da non neskei egindako neurketa guztiak eta mutilei egindakoak banatuta agertzen diren. Honela, tendentziak hobeto ikusiko dira.
Datuen taularaketa amaitu dugu eta materiala bilatzera joan gara: NXT bat eta legozko robotikako piezak. Orain, gure hasierako eskuaren prototipoa (lastotxoskoa) osatzen saiatuko gara NXT eta bere sentsoreen laguntzaz. Pentsatu duguna honako hau da: biratzen duen motore bat jarriko diogu eskuaren hatzamarrak mugitzen dituen sokei eta presiozko sentsore batek motorra biraraziko du. Honela, eskuak zerbait «hartzerakoan» itxi egingo da.
Honekin batera gure ikerketaren beste ardatz bat lantzen hasten gara: programazioa. NXT-a programatzen ikasi beharko dugu eskuari mugimendu desberdinak eman nahiko badizkiogu.
LHko umeei neurrietatik ateratako informazioa hainbat paper eta listetan daukagu, eta datu hoiek landu beharko ditugu geroago egingo ditugun kalkuloak egiteko. Ume guztiak adina, altuera, eskuaren luzeera edo sexua bezalako parametroen bitartez excel taula desberdinetan sartzen hasi gara eta bukatzen dugunean hau batazbesteko ezberdinen arteko erlazioa aurkitzen saiatzeko programak eskaintzen dituen ebazpen sistemak erabiliko ditugu.
Gaur azkenengo eguna izan da Lehen Hezkuntzara joan garela. Bi astetan zehar lehenengo mailako A klasera, bigarreneko E, hirugarreneko C, laugarreneko C, bostgarreneko A eta seigarreneko E klasetara joan gara.
Gaur bisitatu dugun klasea lehengo mailakoa izan da. Anekdota bezala, neurriak hartzerakoan eskua luzatzeko eskatzen genien umeei eta mutil gehienek bostekoa ematen ziguten.
Aste honetan zehar Lehen Hezkuntzako klaseetara joan gara umeei neurketak egitera. Egun bakoitzean maila desberdin batera joan gara (lehengo mailatik seigarren mailara) modu honetan adin desberdineko pertsonak aztertzeko.
Umeei aztertu dizkiegun parametroak honako hauek dira:
Altuera
Pisua
Sexua
Eskuaren tamaina
Falangearen tamaina*
*Falangearen neurketa egin dugu eskuaren parametrizazio matematikoa egiteko beharrezkoa izango delako.
Hona hemen gure neurketei buruzko argazki desberdinak:


 Hona hemen bideo bat, non eskua nola ixten den ikusi daitekeen:
Hona hemen bideo bat, non eskua nola ixten den ikusi daitekeen: